




Spectral Surface Reconstruction from Noisy Point Clouds

Abstract
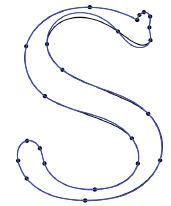
We introduce a noise-resistant algorithm for reconstructing a watertight surface from point cloud data. It forms a Delaunay tetrahedralization, then uses a variant of spectral graph partitioning to decide whether each tetrahedron is inside or outside the original object. The reconstructed surface triangulation is the set of triangular faces where inside and outside tetrahedra meet. Because the spectral partitioner makes local decisions based on a global view of the model, it can ignore outliers, patch holes and undersampled regions, and surmount ambiguity due to measurement errors. Our algorithm can optionally produce a manifold surface. We present empirical evidence that our implementation is substantially more robust than several closely related surface reconstruction programs.
Citation
Ravikrishna Kolluri, Jonathan R. Shewchuk, and James F. O'Brien. "Spectral Surface Reconstruction from Noisy Point Clouds". In Symposium on Geometry Processing, pages 11–21. ACM Press, July 2004.
Supplemental Material
Talk Slides
Slides used for presentation at SGP 2004