




Modeling and Perception of Deformable One-Dimensional Objects
Download Paper
Download Bibtex
Authors
- Shervin Javdani
- Sameep Tandon
- Jie Tang
- James F. O'Brien
- Pieter Abbeel
Related Links
Abstract
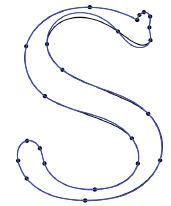
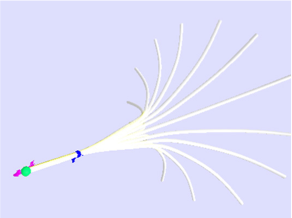
Recent advances in the modeling of deformable one-dimensional objects (DOOs) such as surgical suture, rope, and hair show significant promise for improving the simulation, perception, and manipulation of such objects. An important application of these tasks lies in the area of medical robotics, where robotic surgical assistants have the potential to greatly reduce surgeon fatigue and human error by improving the accuracy, speed, and robustness of surgical tasks such as suturing. However, different types of DOOs exhibit a variety of bending and twisting behaviors that are highly dependent on material properties. This paper proposes an approach for fitting simulation models of DOOs to observed data. Our approach learns an energy function such that observed DOOs configurations lie in local energy minima. Our experiments on a variety of DOOs show that models fitted to different types of DOOs using our approach enable accurate prediction of future configurations. Additionally, we explore the application of our learned model to the perception of DOOs.
Citation
Shervin Javdani, Sameep Tandon, Jie Tang, James F. O'Brien, and Pieter Abbeel. "Modeling and Perception of Deformable One-Dimensional Objects". In Proceedings of IEEE International Conference on Robotics and Automation (ICRA) 2011, pages 1–8, May 2011.
Supplemental Material
Learning data and images
Note: This file is about 1.1 GB in size.