


Bringing Clothing into Desired Configurations with Limited Perception
Abstract
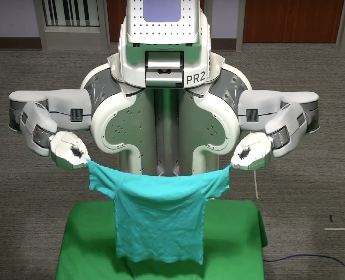
We consider the problem of autonomously bringing an article of clothing into a desired configuration using a general-purpose two-armed robot. We propose a hidden Markov model (HMM) for estimating the identity of the article and tracking the article's configuration throughout a specific sequence of manipulations and observations. At the end of this sequence, the article's configuration is known, though not necessarily desired. The estimated identity and configuration of the article are then used to plan a second sequence of manipulations that brings the article into the desired configuration. We propose a relaxation of a strain-limiting finite element model for cloth simulation that can be solved via convex optimization; this serves as the basis of the transition and observation models of the HMM. The observation model uses simple perceptual cues consisting of the height of the article when held by a single gripper and the silhouette of the article when held by two grippers. The model accurately estimates the identity and configuration of clothing articles, enabling our procedure to autonomously bring a variety of articles into desired configurations that are useful for other tasks, such as folding.
Citation
Marco Cusumano-Towner, Arjun Singh, Stephen Miller, James F. O'Brien, and Pieter Abbeel. "Bringing Clothing into Desired Configurations with Limited Perception". In Proceedings of IEEE International Conference on Robotics and Automation (ICRA) 2011, pages 1–8, May 2011.
Supplemental Material
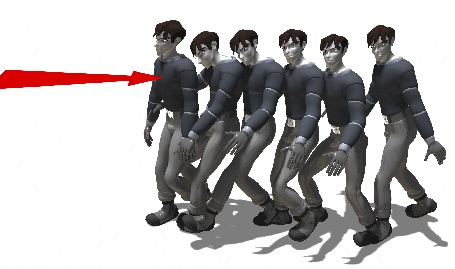
Demonstration with a pair of pants